Introduction to ABACUS: Path to PW calculation - Summary 1
作者:黄一珂,邮箱:huangyk@aisi.ac.cn;金祖鑫,邮箱:jinzx@aisi.ac.cn
审核:陈默涵,邮箱:mohanchen@pku.edu.cn
飞书链接:Introduction to ABACUS: Path to PW calculation - Summary 1
🏮写在前面 经过 Introduction to ABACUS: Path to PW calculation 的 Part1 到 5,我们已经阅读过上百行程序。在继续之前,有必要将已经解读过的内容再次就重点进行回顾,并凝练和一定程度的抽象。牢记本系列内容组织的两原则:
- 不脱离代码——避免读者看完手册后对代码没有一丁点概念
- 不堆砌代码解释——避免平庸的代码解释,努力兼顾拉近读者和代码距离的同时,做到提纲挈领,不逐行复制代码后进行停留在代码语义上的解释
主题 1:dataflow
1. 全局变量
不仅在上篇(Part 5)的最后,在 k 点分发时我们看到了在 GlobalC 中声明为 extern 的 Parallel_Kpoints 类对象 Pkpoints,在很多地方会被直接调用的 UnitCell 类对象 ucell,以及实际上最一开始看到的 Input 类对象 INPUT,也被声明为 extern。
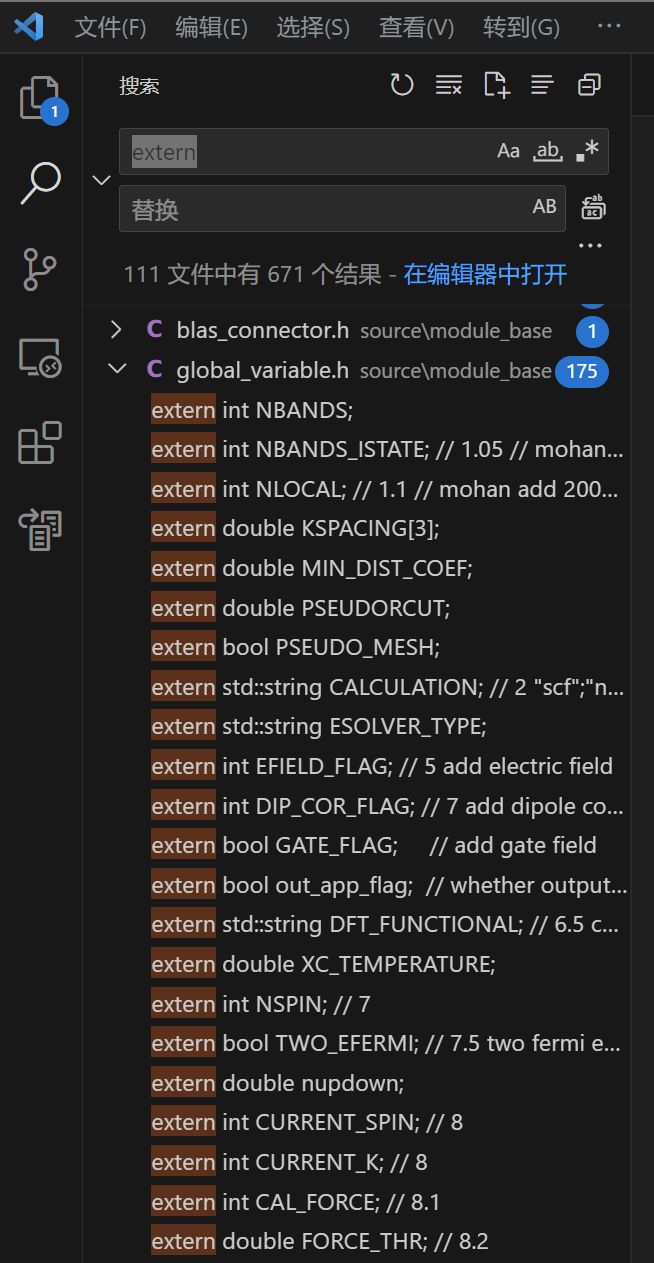
extern 标识变量的好处(1)是跨文件/跨模块可用,以至于可以尽量缩减每个函数的形参表体积,(2)维持变量的唯一性,若又有其他变量具有相同名字,则编译阶段无法通过。但缺点是 extern 变量可能被修改,修改后则所有用到该 extern 变量的地方均受影响。另外 extern 的使用不当可能会(1)破坏封装性,为函数、变量、类、模块带来深度耦合,为之后的开发工作带来困难,(2)带来异常大的程序运行内存开销——因为有些变量确实可以具有短于整个程序的生命周期。
另一方面,如果有 extern 变量的生命周期和整个程序相同,可能给开发者带来困难:判断其何时何阶段具有何值就更有难度。
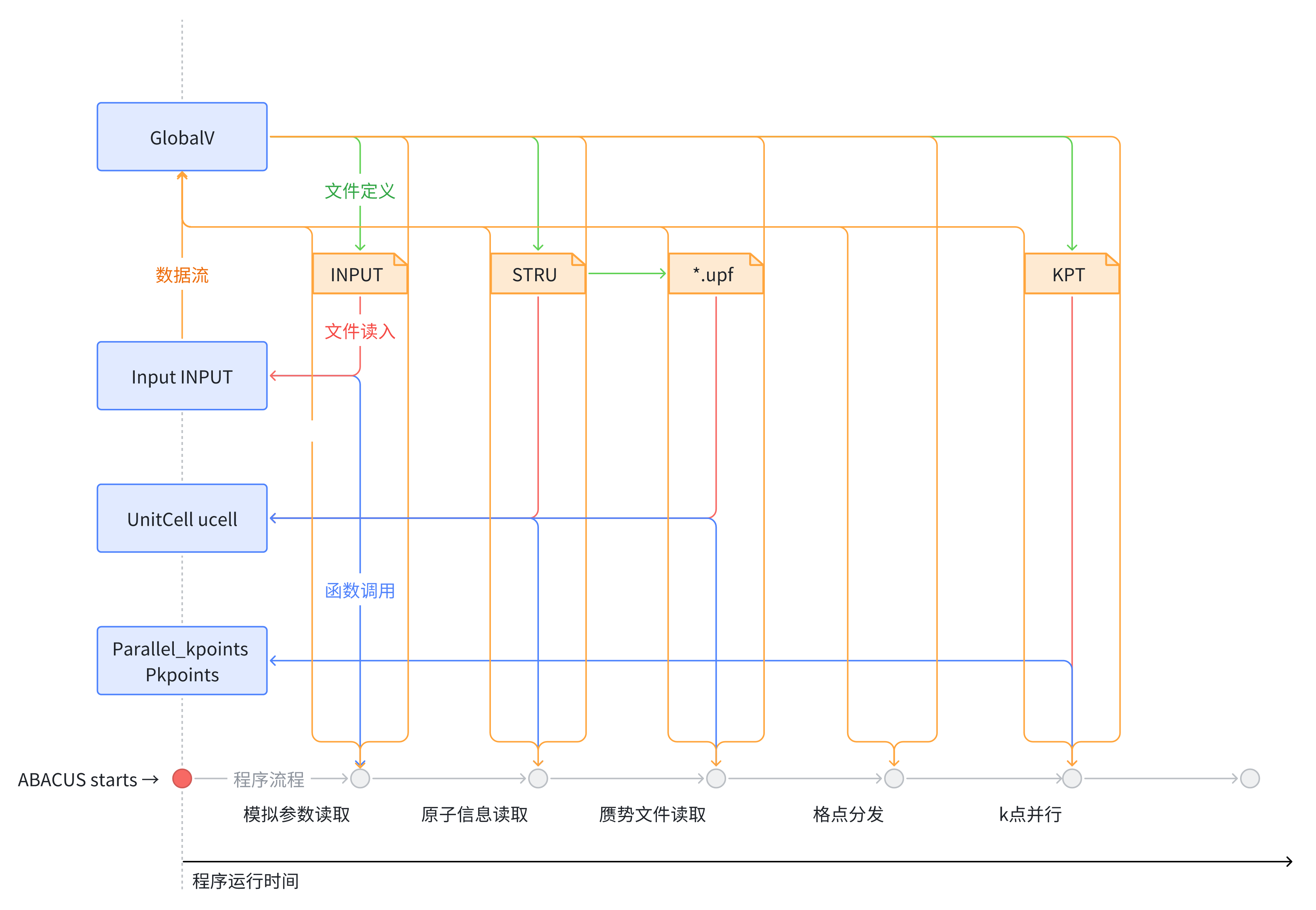
2. 输入文件读取
综合前 5 篇介绍的内容,结合 ABACUS workflow 的赋值顺序,将有关的全局变量总结如下:
主题 2:分发存储
1. 格点分发
在 Part 4,我们解读过 ABACUS 关于实空间格点与倒空间格点的分发策略。我们需要重新确定所分发的产物是什么。
实际上,在实空间进行积分的量基本都和电荷密度有关,因此格点数量实际通过 ecutrho 来控制。同时考虑到 FFT 的维数问题,因此基本要求是实空间和倒空间格点数目完全一致(除去 gamma_only 情况),即
this->fftnx = this->nx;
this->fftny = this->ny;
this->fftnz = this->nz;
1.1 实空间格点(link)
实空间格点的分发策略分两步:
- xyz 三维实空间沿 z 轴切片
- 切片按照先按 processors 均分,若有余则再按顺序分配
实空间格点划分后在 PW_Basis 类中,如下成员变量被赋值:
| PW_Basis 类内数据成员 | 变量意义 |
|---|---|
this->numz |
列表,每个 processor 所分得 xy 平面数量 |
this->nplane |
当前 processor 所分得 xy 平面数量 |
this->startz |
列表,每个 processor 分得 xy 平面后,所具有平面沿 z 方向的起始索引 |
this->startz_current |
当前 processor 分得 xy 平面后,所具有平面沿 z 方向的起始索引 |
this->nrxx |
当前 processor 分得实空间格点数量 |
因此实空间的格点分发对于每个 processor 来说,能够特征识别的仅仅是 this->nplane 和 this->startz_current,主要为以上两量具有特征,且真正进行运算时,可以根据 this->startz_current 来分配数据(作为结果地,this->nrxx 是 processor 具有的实空间格点数)。
可以预想,对于三维空间的数据,可以以 this->startz_current 为依据分配具有数据的格点给不同 processor,也可使用一个 processor,访问 this->startz 数组来实现三维空间格点数据在 processor 间的分发。
1.2 倒空间格点(link)
倒空间的格点分发策略分两步:
- 首先在 ecutrho 划定倒空间球壳(我们约定,以后简称“ecutrho/ecutwfc 球壳”)内沿 z 方向划分出不同数量的“棍子”,即每根“棍子”包含一定数量的相同(x,y)而不同 z 的倒空间格点
- 将“棍子”长度按照降序排列后,按照“当前所有 processors 中具有最小‘棍子’累计高度的,优先分配”为原则进行分发
倒空间格点划分后在 PW_Basis 类中,如下成员变量被赋值:
| PW_Basis 类内数据成员 | 变量意义 |
|---|---|
this->startnsz_per |
每个包含“棍子”的 processor 其第一个 z-axis grid point 的编号,从 0 开始,跨 processor。 |
this->npw |
当前 processor 分得平面波数量(亦即倒空间格点数量) |
this->npw_per |
列表,每个 processor 分得平面波数量(亦即倒空间格点数量) |
this->nst |
当前 processor 分得“棍子”数量 |
this->nst_per |
列表,每个 processor 分得“棍子”数量 |
this->nstnz |
this->nstnz = this->nst * this->nz |
this->npwtot |
平面波总数 |
this->fftixy2ip |
从“棍子”translated (x,y)-pair 到 processor index 的映射 |
this->istot2ixy |
从“棍子”索引到非折叠倒空间折合坐标的映射 |
this->ig2isz |
从平面波的 processor 内索引,到其倒空间平移后 z 坐标的映射 |
this->is2fftixy |
每个 processor 各有一份,建立从 procesor 内“棍子”索引到其折叠后倒空间 xy 平面折合坐标的映射 |
this->numg |
列表,从当前 processor 从实空间 z 方向格点/xy 平面到所有 processors 的倒空间 sticks 的映射数量 |
this->numr |
列表,当前 processor 从倒空间到所有 processors 所拥有 this->numz,即实空间 z 方向格点/xy 平面数量的映射数量 |
this->startg |
列表,this->numg 的从当前 processor 到所有 processor 的映射的起始索引 |
this->startr |
列表,this->numr 的从当前 processor 到所有 processor 的映射的起始索引 |
this->ig2igg |
从归约前平面波索引到归约后模长列表的索引的映射 |
this->gg_uniq |
列表,归约后平面波数量 |
由于倒空间格点的分发比较复杂,因此各个 processor 分得的格点,需要从 ecutrho 球壳中格点到 processor 进行 mapping,也需要方便地从 processor 中格点方便地知道其所对应(x,y,z)。
举例定义分发后的某倒空间格点为(ip, is, iz),其中 ip 为 index_processor,is 为 index_stick_processor,即在当前 processor 中“棍子”的索引,iz 为 index_z_stick,即在当前“棍子”中格点的索引(实际等价于 z 坐标的索引),则(😀 以下建立两坐标系的双向 1-1 映射过程可以出成思考题):
(ip, is, iz)→(x, y, z):ip 人为给定、this->is2fftixy 确定从(ip, is)到(x, y)映射,iz 则实际上可以直接换算——因为 ecutrho 球壳关于 z=0 平面上下对称。
(x, y, z)→(ip, is, iz):this->fftixy2ip 确定 ip,在 ip 中得到 this->nst,再访问当前 processor 的 this->is2fftixy,核对(x, y),得到 is,然后转换 z 到 iz。
2. k 点分发(link)
k 点的分发策略分三步:
- 按照用户给定方式生成 k 点:Gamma、Monkhorst-Pack、给定 k 点、k path
- 通过确定的对称性,对所生成的 k 点进行对称变换,对 k 点数量进行归约
- k 点先按 processor 均分,若有余则再按顺序分配
k 点分发后在 K_Vectors 类中,主要有如下成员变量被赋值:
| PW_Basis 类内数据成员 | 变量意义 |
|---|---|
| this->kvec_c | 列表,当前 processor 分得 k 点的 Cartesian 坐标 |
| this->kvec_d | 列表,当前 processor 分得 k 点的 Direct 坐标 |
| this->wk | 列表,当前 processor 分得 k 点的权重 |
| this->isk | 列表,当前 processor 分得 k 点的 spin channel, 0: alpha, 1: beta |
| this->nks | 当前 processor 分得 k 点的数量 |
| this->nkstot | k 点总数 |
因此 k 点分发直接获得 k 点坐标和对应权重,以及 spin channel 的标识。
开发初步尝试:doxygen 注释和单元测试
1. 程序注释规范
1.1 现状介绍
诚然这个系列的文档是为让 ABACUS 新晋开发者更快熟悉 ABACUS 代码,清楚 ABACUS 中各个变量和功能可能声明、初始化和实现的位置,以及变量间的从属关系,但文档的发行速度和更新速度远慢于 ABACUS 新版本的开发。因为这一点,ABACUS 开发团队同时希望 ABACUS 的信息 self-contained,即在每个程序文件中都有足够详尽的关于当前文件内容的注释,以及其他可能需要的信息。
然而由于 ABACUS 的历史较长,ABACUS 的开发者也所属组织和单位众多,因此除了代码风格多样外,注释风格也十分多样。格式和缩写各异的注释使得代码整洁程度下降,因此代码主体的可读性降低,并且注释的可读性也难以保证。
目前在 ABACUS 中存在的代码注释风格按添加注释的位置分类主要包括两种:随行注释和 Section 注释。
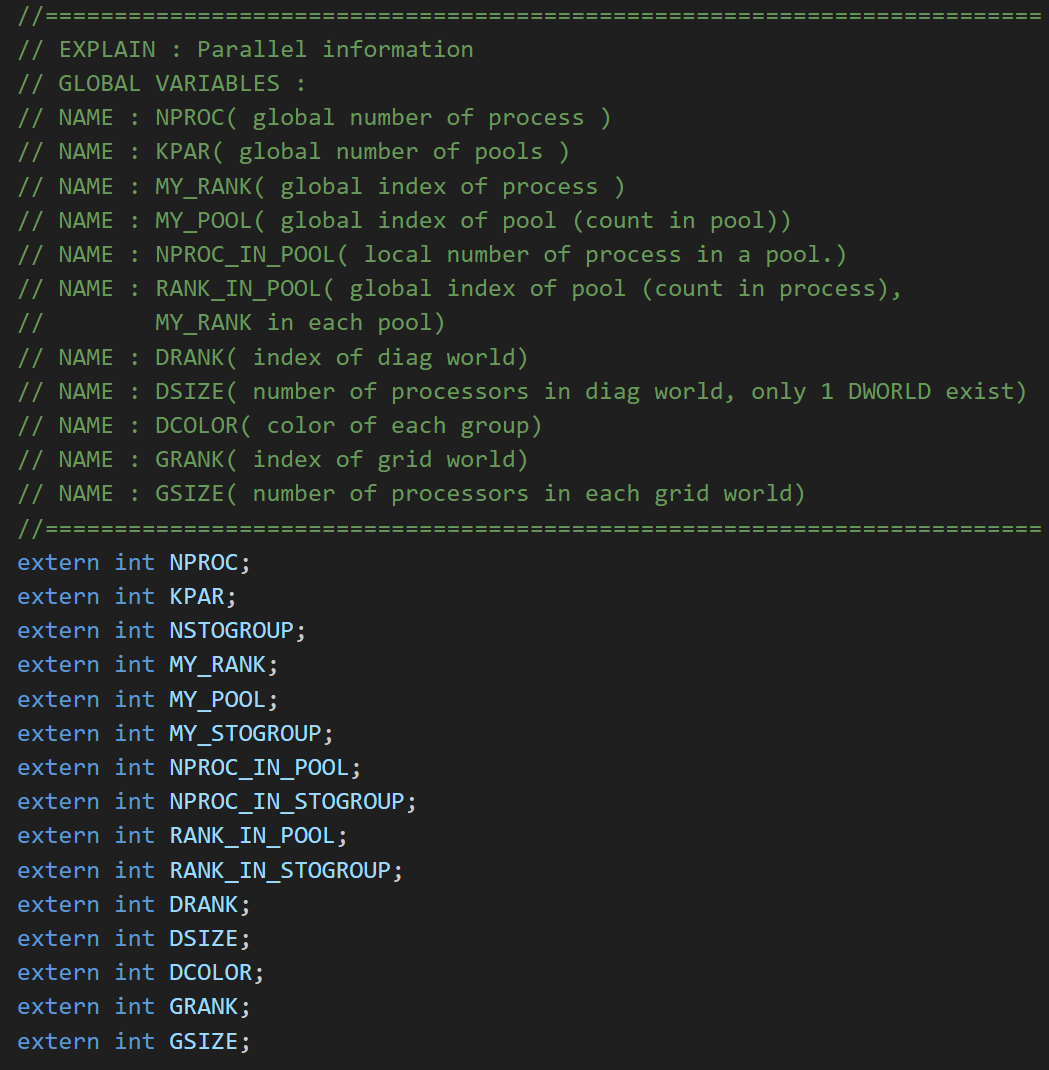
然而,在头文件中添加 section 型注释可能会导致在 vscode 中讲注释显示在临近的第一个变量/函数上(如上图,会显示在 NPROC 上),而其他各变量和函数均保持未注释状态,此时在其他代码位置鼠标悬停时不会有注释显式。
1.2 基本注释原则
1.2.1 Doxygen 注释
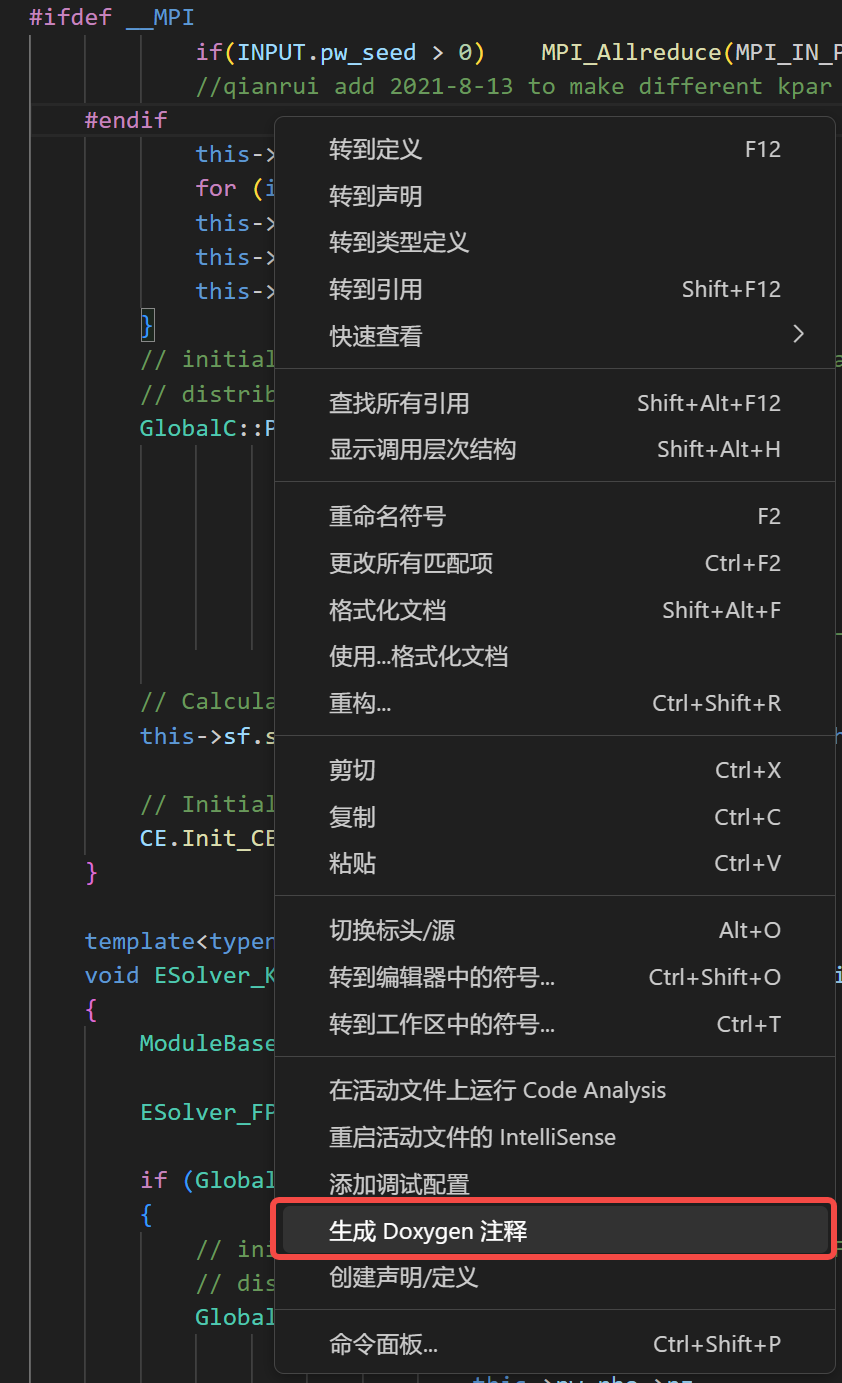
ABACUS 现在推进 doxygen 格式的注释。Doxygen 注释在 vscode 中可以使用插件进行模板插入:
Doxygen 函数注释样例:
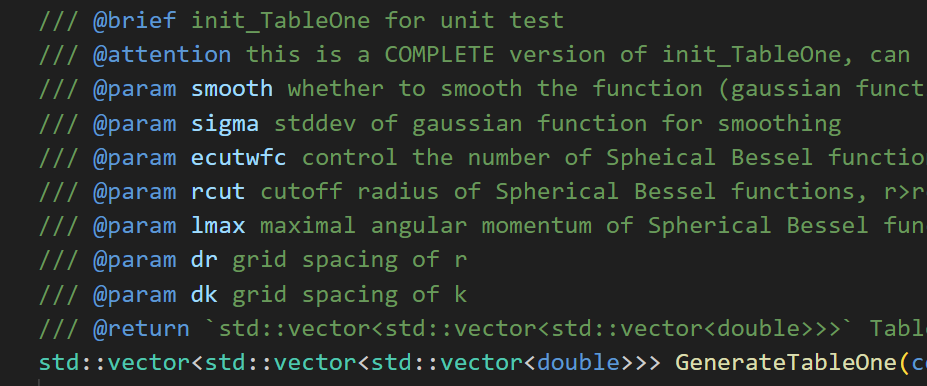 |
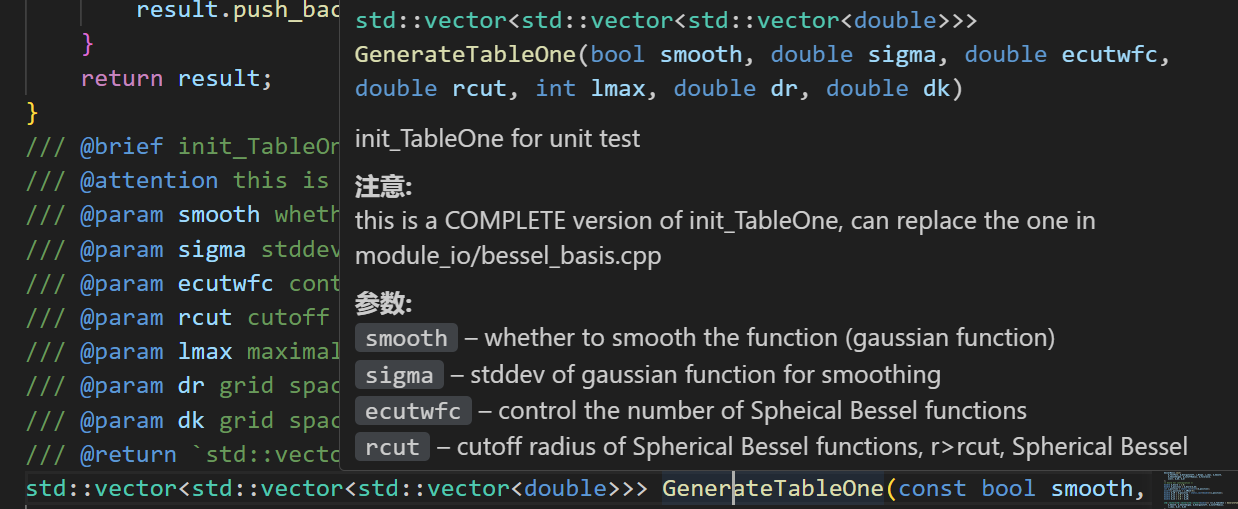 |
|---|---|
1.2.2 若干注意事项
- 对于某个类中数据成员和成员函数的注释,请添加在相应的头文件中,避免在源文件中添加此类注释。对于程序代码的注释则没有要求,只需保证清晰明了。
- (对于头文件中添加的函数注释)特别对于一些 void 类型函数,形参表中变量既有输入也有输出的,在
@param字段注明“[in]”或者"[out]"作为标识 @brief字段尽量保证描述清晰且语言简洁,更多的内容可以添加在@details字段- 注意事项等可以添加在
@attention字段
1.3 为了更平滑的开发和维护:扩展注释内容
1.3.1 模块封装化注释
封装、继承和多态是包括 C++ 在内的高级编程语言的核心理念。良好的封装有助于保护程序运行的稳定性,同时有利于开发工作的开展。然而,封装不仅仅是局部而言对某个类的封装,更应该将封装的理念应用于整体的程序设计。程序整体组织层面的封装,有利于在程序因一定需求需大幅改变结构时,能够稳定运行而不出错,同时能够实现各部分的独立、高效开发。
现阶段 ABACUS 缺乏模块层级的注释,即对于某个模块(module)究竟需要传入哪些参数/物理量/性质,传出哪些参数/物理量/性质,是尚未总结和落实到文档中的方面。
1.3.2 上游-下游函数注释
另一方面,除去 vscode 自身所包含的“查找所有引用”/“转到引用”的功能外,鼓励为函数添加注释时,添加 @note 字段,注明引用该函数的下游函数,即:考虑到通过 vscode“查看定义”,以及函数本身的调用方式可以方便查找到当前函数的上游函数,但在上游函数却较为困难获知被何下游函数调用。
注释下游函数有利于局部重构工作的开展。
2. 单元测试
大型程序包含数量众多的函数,对 C++ 等支持 OOP 的语言来说,也包含更多的类等。保障程序中各函数的顺利和正确执行,是保障程序整体能够运行的基础。对于数值计算软件来说,除去正常运行测试外,之后也应包括数值精度测试,这一理念的前提是开发者具有数值计算软件的编程常识,如避免小数位数丢失、DivideZeroError、相减精度丢失等数值错误,同时也将推动 ABACUS 在精度方面进行一定数量的小范围重构,符合 2023 Q2 推行的“测试驱动开发(Test Driven Development, TDD)”理念。
2.1 单元测试的设计原则
- 独立性:在设计和编写单元测试时,应当尽可能减少对其他部分函数的依赖,当作其他函数并未测试,因此可靠性不能保证。
- 高覆盖:对于程序流程控制出现分支的情况,应酌情对所有分支进行全面覆盖,以保证所有分支的函数和运算都可以正常执行。
- 自动:禁止出现 stdin 交互
- 快速:因为仅需要测试函数是否正常运行,是否可以得到预期结果,因此需要尽可能避免使用需要高时间复杂度的计算方式,而是使用尽可能简单(可以 unphysical)的数据,尽可能快地得出结果,可以考虑对预期结果进行硬编码。
2.2 对 private 变量的访问
由于当前 ABACUS 代码的封装并不完善,部分函数声明为 private 却仍然需要测试。另一方面,getter 和 setter 函数在原则上应当是从外部直接访问私有变量的唯一方式,但在使用之前也需要进行有效性测试。考虑到这两点,我们不得不尝试访问 private 或 protected 变量和成员函数。目前而言 ABACUS 中对 private 变量访问的方式主要有两种:
#define private public,已知此种方式有一定情况不兼容,从而导致无法编译通过。 - 我们曾对访问 private 成员的方法进行过讨论,搜集到解决方案如下:https://github.com/deepmodeling/abacus-develop/issues/2666 C++ 委员会有关于几种访问私有成员的方式及其讨论:http://www.gotw.ca/gotw/076.htm
2.3 更多细节补充
ABACUS 的单元测试依靠 Googletest 框架实现。关于 Googletest 的安装、单元测试的运行、单元测试的注释规范等,见:ABACUS 测试者必知必会 。
为保证本地机器的工作不受影响,建议单元测试的编译和进行在 Bohrium 平台进行。
3. Fork and Pull request:在 ABACUS 上发布你的注释和单元测试,甚至更多!
3.1 Fork 和 Pull request
Fork 是便于进行多人协作开发的机制,其“叉子”体现在:
- 从待开发的软件仓库其软件的开发时间线创建时间线分支,即 Fork,到自己的仓库
- 在自己的仓库进行的任何改动将不会直接影响到原程序的时间线,但可以通过代码改动比较,来尽可能无冲突地将多人的改动进行合并
- 提交自己的改动,将自己 Fork 出的时间线和原有时间线进行合并的操作称为 Pull request (PR)
3.2 工作流示例 1
- Fork ABACUS Github 仓库到自己的账号下
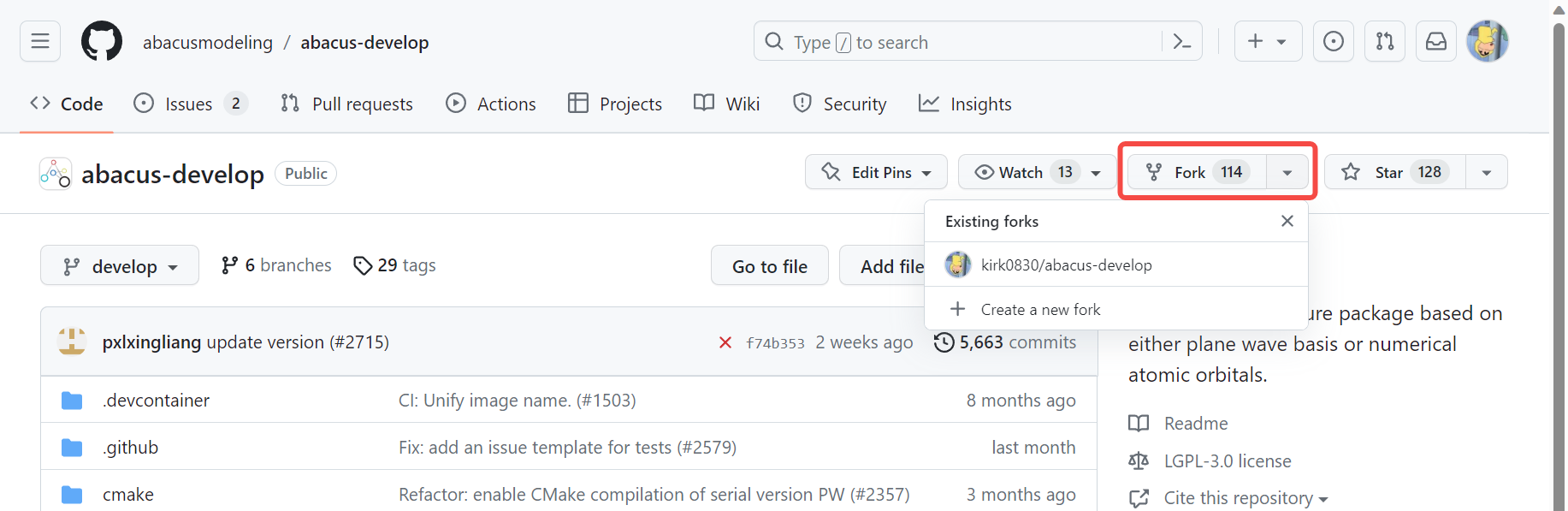
- 在自己的 ABACUS 仓库选择同步到 Github Desktop
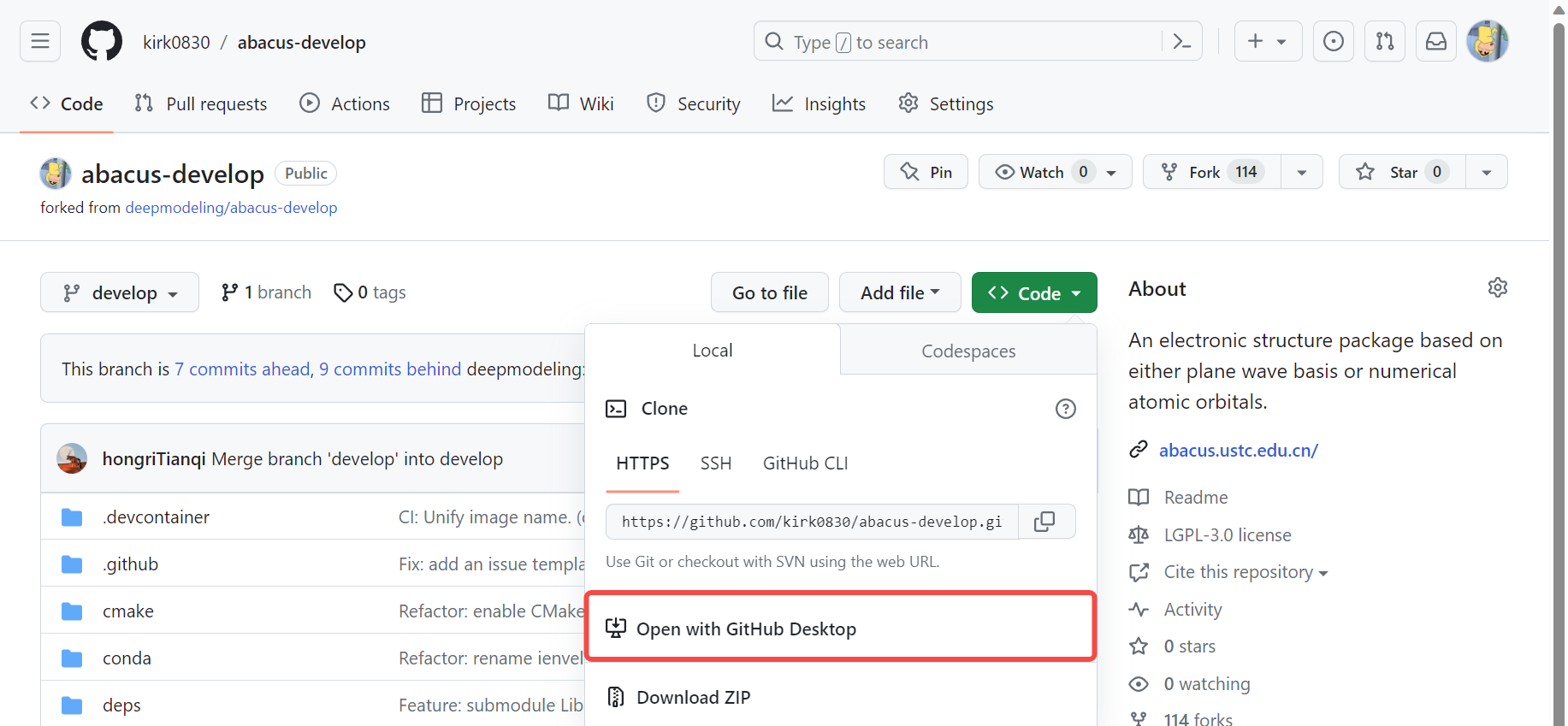
- 在 Github Desktop 中选择自己的 ABACUS 仓库,之后选择在 Vscode 中打开
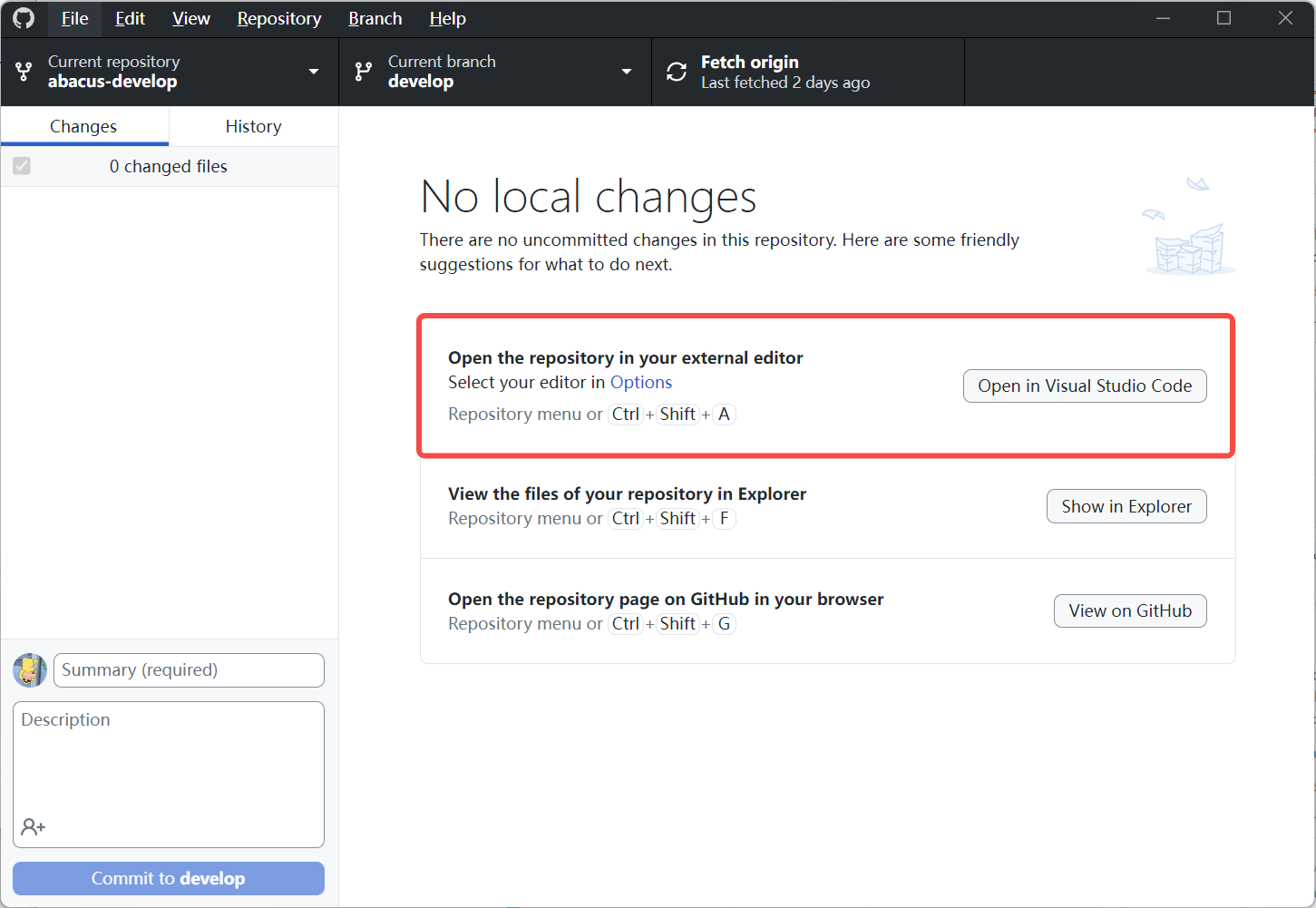
- 在 Vscode 上进行代码修改,每一次改动的保存都会同步被 Github Desktop 记录
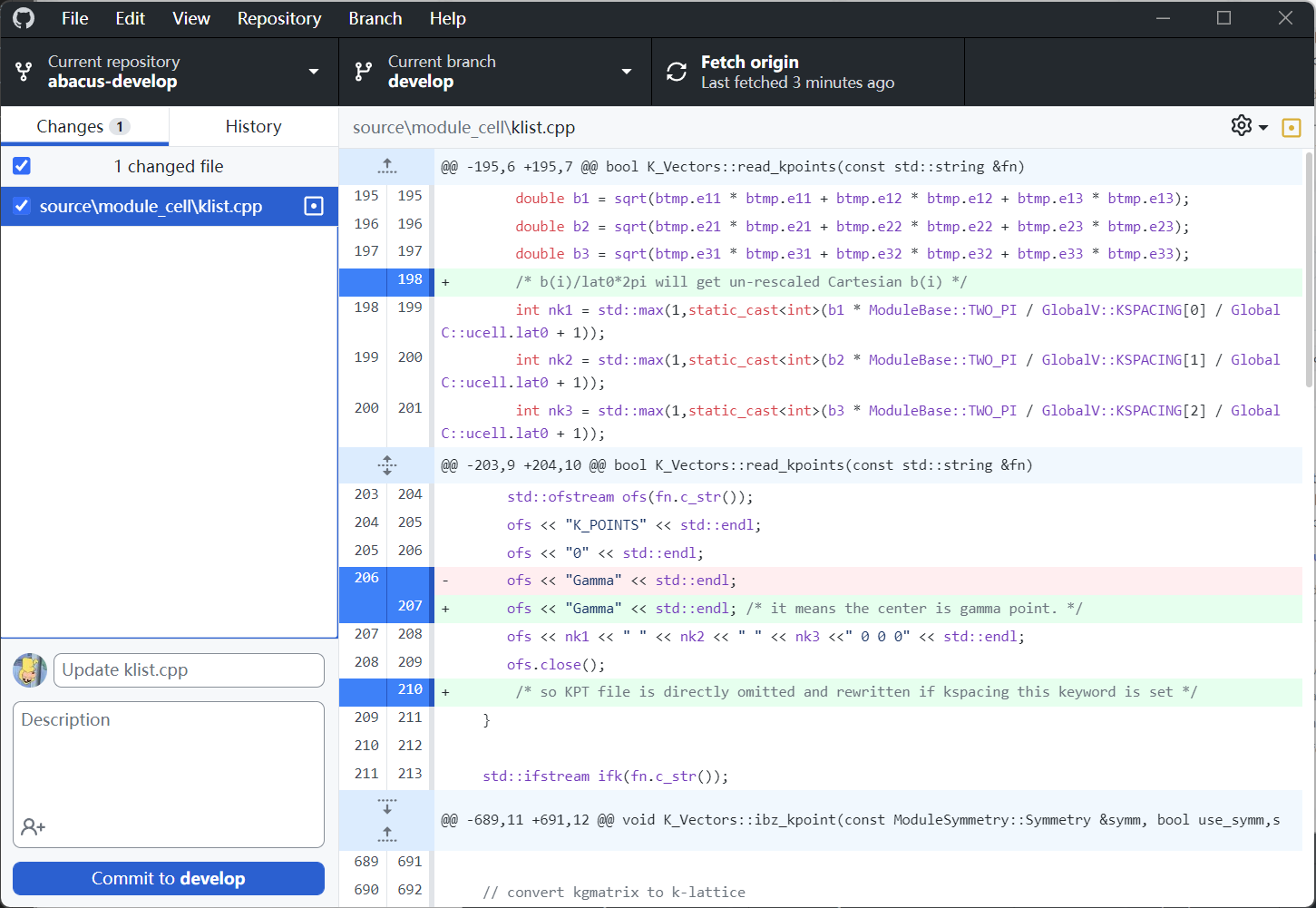
- 重新编译、进行测试
- 在 Github Desktop 里选择左下角“Commit to develop”,然后“Push origin”将代码改动 push 到自己的 ABACUS 仓库
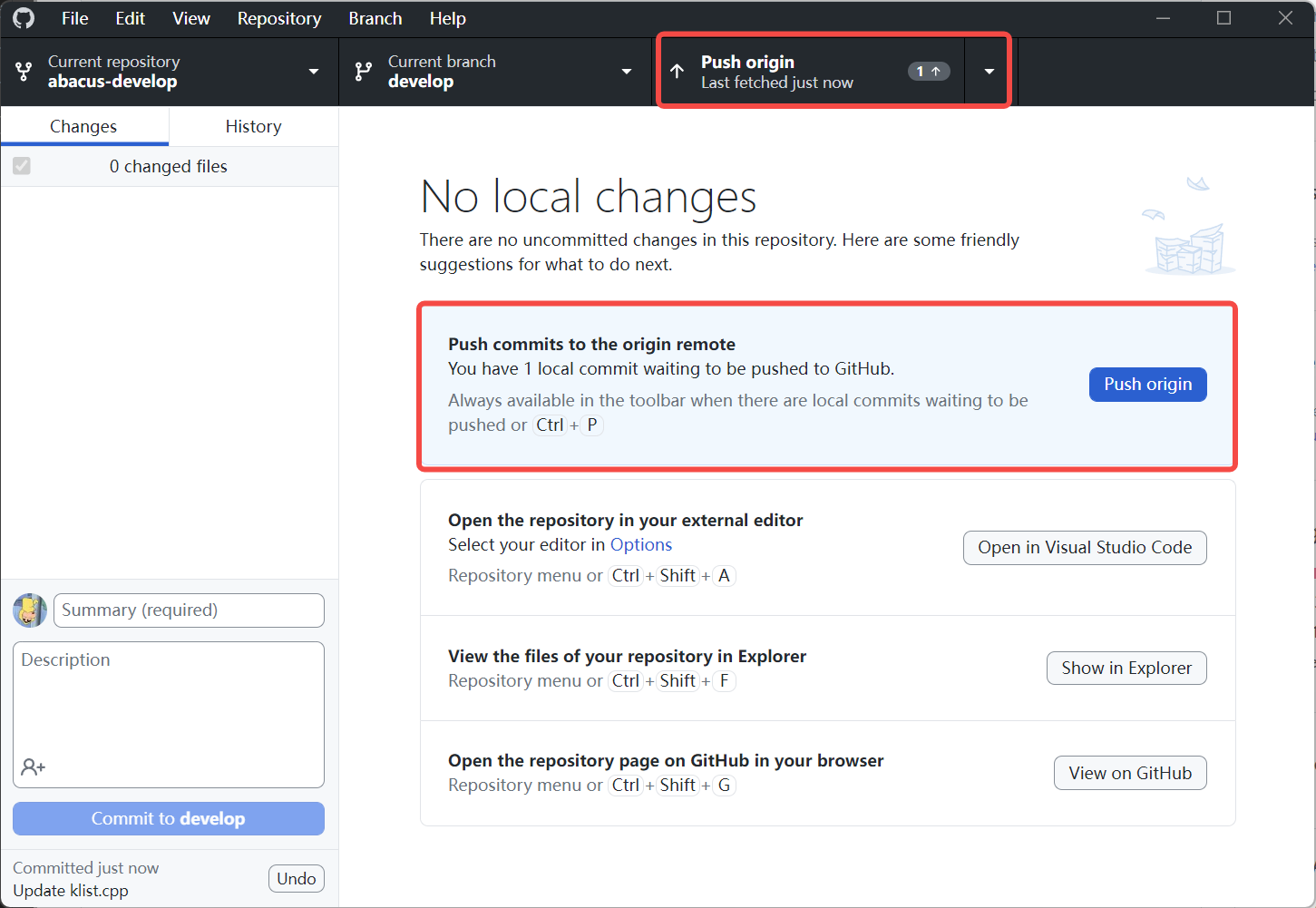
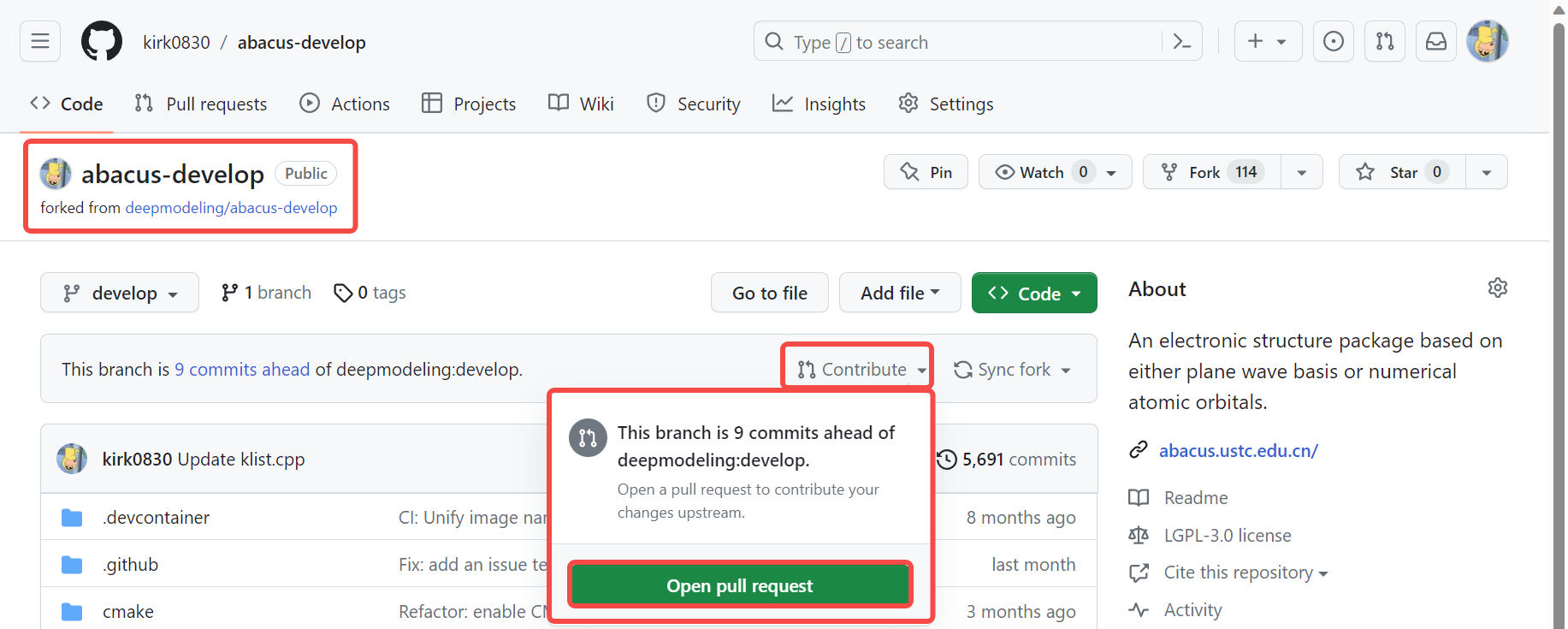
- Github Desktop 中选择打开自己的仓库,再次审核代码改动后创建 pull request,待自动代码编译检查通过与代码人工审核
3.3 工作流示例2
Contributing to ABACUS ‒ ABACUS documentation
附:如何在飞书中平滑地分享文档
权限简介
在进行文档写作前,请确定自己账号所在的组织(如深势科技“DP”或北京科学智能研究院“AISI”)。一般而言对于创建的文档,非本人外的访问均需要文档作者进行分享,或在其他地方获得文档链接后,其阅读权限需要向作者发送权限申请。根据作者对文档的开放程度,可以分别赋予可阅读、可编辑、可管理权限,其权限自由度由低到高。
然而对于组织外,一般无文档阅读权限。
无限制访问
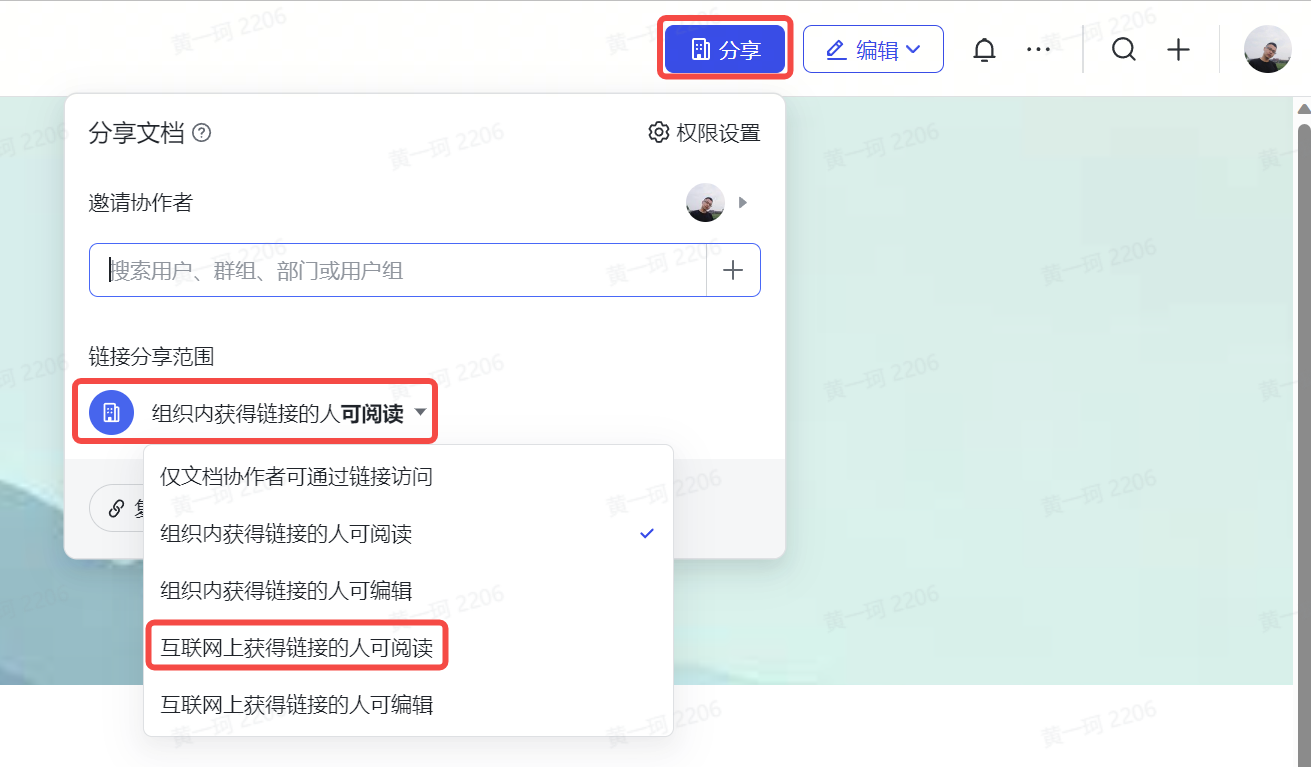
为了解决这一问题,可以在文档管理中按照如下方式设置:
(电脑端)
打开文档,在文档右上角依次选择:
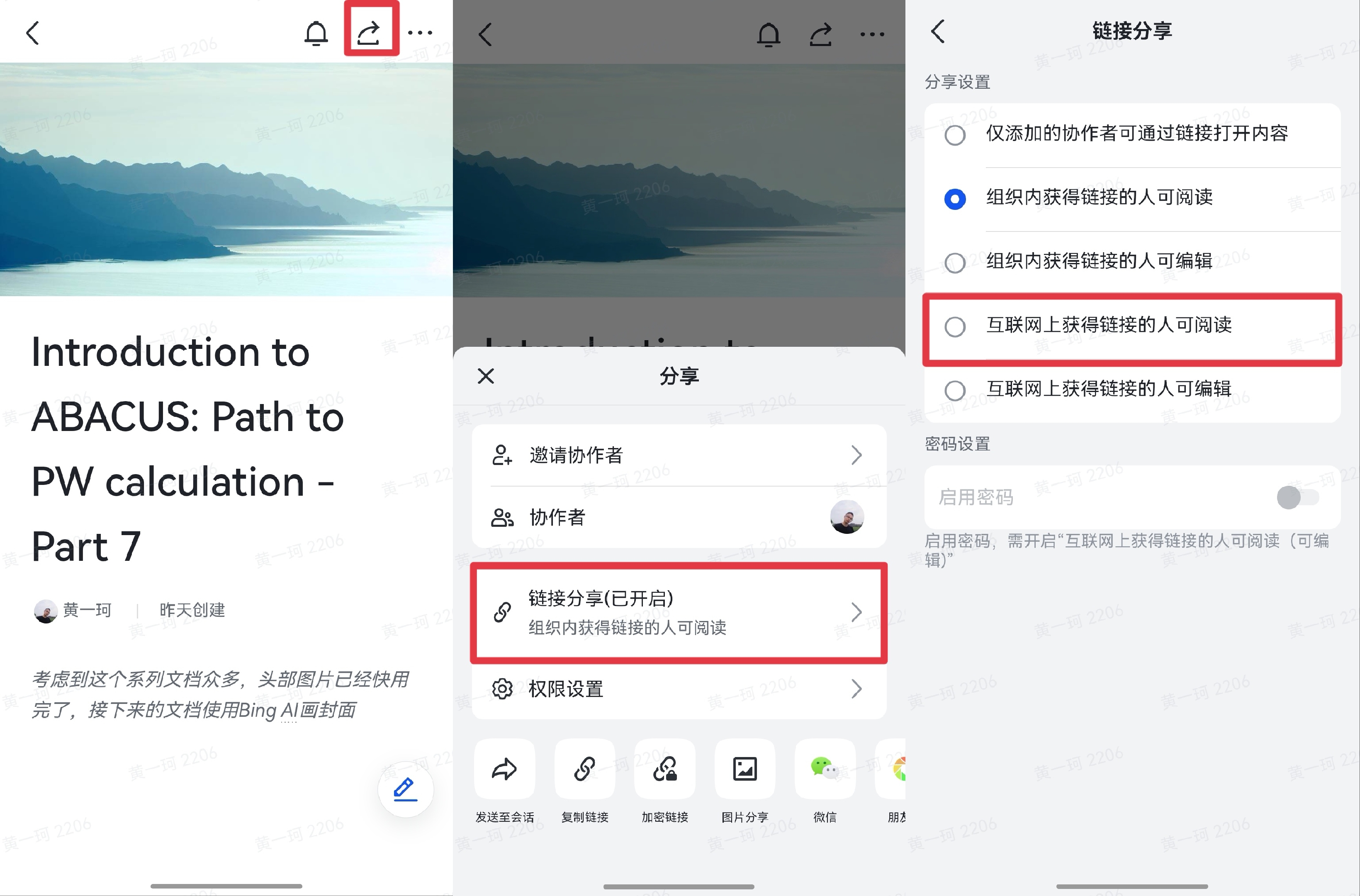
(手机端)
系列链接
INPUT 读取:Introduction to ABACUS: Path to PW calculation - Part 1
STRU 读取:Introduction to ABACUS: Path to PW calculation - Part 2
赝势读取:Introduction to ABACUS: Path to PW calculation - Part 3
平面波并行与分发:Introduction to ABACUS: Path to PW calculation - Part 4
k 点并行与分发:Introduction to ABACUS: Path to PW calculation - Part 5